#include <gps_position.hh>
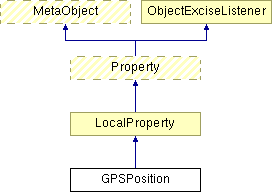
Inheritance diagram for GPSPosition:
|
|
Constructor: initializes values and oens socket to gpsd.
Definition at line 39 of file gps_position.cc. Referenced by new_GPSPosition(). |
|
|
Destructor: closes socket.
Definition at line 64 of file gps_position.cc. |
|
|
Fix altitude (Y position) to some value.
Definition at line 164 of file gps_position.hh. |
|
|
Send status command to gpsd and return response. -1 is returned on connection/communicaiton error. Definition at line 128 of file gps_position.cc. |
|
||||||||||||
|
This method is used by MetaFactory to create a new instance of this class.
Definition at line 124 of file gps_position.hh. Referenced by registerExtenders(). |
|
|
Register GPSPosition with MetaFactory by typeid(GPSPosition).name, as a local object extension. You must also call Property::registerExtenders()! Reimplemented from Property. Definition at line 119 of file gps_position.hh. |
|
||||||||||||||||
|
Set offsets. ( (Final value) = (Original value + Offset) * Scaling ). Definition at line 149 of file gps_position.cc. |
|
|
Set precision of values. The default value is 15 decimal places. Must be an integer value >= 0 and <= 15. new precision value
Definition at line 121 of file gps_position.cc. |
|
||||||||||||||||
|
Set scaling multipliers. ( (Final value) = (Original value + Offset) * Scaling ). Definition at line 142 of file gps_position.cc. |
|
||||||||||||
|
Set default gpsd server for future GPSPosition objects.
Definition at line 152 of file gps_position.hh. |
|
|
Set threshold of change before property value is replaced on update() (and therefore update messages sent to listeners).
Definition at line 136 of file gps_position.hh. |
|
|
Update value from gpsd after which you can use read() to get the new value. Call at intervals, or right before a read. Only changes the property value (with a call to replace()) if the difference from the last update is greater than the threshold.
Definition at line 88 of file gps_position.cc. |
|
|
Definition at line 91 of file gps_position.hh. Referenced by setOffsets(). |
|
|
Definition at line 86 of file gps_position.hh. Referenced by setScaling(). |
|
|
Definition at line 94 of file gps_position.hh. Referenced by fixAltitude(). |
|
|
Definition at line 95 of file gps_position.hh. Referenced by fixAltitude(). |
|
|
Definition at line 34 of file gps_position.cc. Referenced by setServer(). |
|
|
Definition at line 35 of file gps_position.cc. Referenced by setServer(). |
|
|
Definition at line 100 of file gps_position.hh. |
|
|
Definition at line 98 of file gps_position.hh. |
|
|
Definition at line 99 of file gps_position.hh. |
|
|
Definition at line 89 of file gps_position.hh. Referenced by setOffsets(). |
|
|
Definition at line 84 of file gps_position.hh. Referenced by setScaling(). |
|
|
Definition at line 90 of file gps_position.hh. Referenced by setOffsets(). |
|
|
Definition at line 85 of file gps_position.hh. Referenced by setScaling(). |
|
|
Definition at line 107 of file gps_position.hh. |
|
|
Definition at line 79 of file gps_position.hh. Referenced by ~GPSPosition(). |
|
|
Definition at line 104 of file gps_position.hh. Referenced by setThreshold(). |
 1.3.2
1.3.2