#include <orientation.hh>
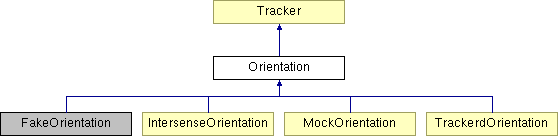
Inheritance diagram for Orientation:
Definition at line 34 of file orientation.hh.
|
|
Constructor.
Definition at line 43 of file orientation.hh. |
|
||||||||||||||||
|
Get yaw, pitch and roll Euler angles.
Implemented in IntersenseOrientation, MockOrientation, and TrackerdOrientation. Referenced by main(). |
|
|
Get an orientaiton matrix [x1 x2 x3][y1 y2 y3][z1 z2 z3].
Implemented in IntersenseOrientation, MockOrientation, and TrackerdOrientation. Referenced by main(). |
|
||||||||||||||||
|
Set euler offsets.
Definition at line 52 of file orientation.hh. |
|
|
Definition at line 38 of file orientation.hh. Referenced by MockOrientation::getEulerAngles(), Orientation(), and setOffsets(). |
|
|
Definition at line 39 of file orientation.hh. Referenced by MockOrientation::getEulerAngles(), Orientation(), and setOffsets(). |
|
|
Definition at line 37 of file orientation.hh. Referenced by MockOrientation::getEulerAngles(), Orientation(), and setOffsets(). |
 1.3.2
1.3.2